
(目前,该设备应用于大亚湾核电站、秦山一期、核动力设计院各一套)
1、 使用环境
适用于水流速度≤5m/min的静、动水域,深度不大于50m,进行水下观测及小型异物抓取,主要用于核电站反应堆水池下的检测、水库堤坝的安全检查以及危险区域的反恐侦察及公安取证等特殊场合。
具有重量轻、智能化、操作方便等特点。
2、设备组成及主要原理
本设备集光学、机械、多传感器信号融合、自动化控制、图像存储技术于一体。采用模块化设计,降低了功能模块维护的复杂性,提高了系统的可靠性,便于设备功能的扩展。
机器人本体:主要由控制电路系统、主体推进器(三套)、前进及后退摄像与监视系统、前进摄像机一维云台、小型抓取机械手系统、摄像照明系统组成。
其中控制电路系统包含各类电源模块、驱动控制模块、压力传感器(深度计)、温度计等传感器。
主体推进器选用瑞士进口的maxon电机作为驱动元件,具有小体积、高性能、低惯量等优点。其采用目前流行的恒频脉宽调制技术(PWM)实现电机的调速。
便携式显示与操作控制箱:由系统主控制模块、15英寸液晶显示器、图像存储卡、机器人本体运动控制遥杆、前摄像机云台运动控制遥杆、照明系统亮度控制旋纽等组成。
3、功能和技术要求
该机器人具有前进、后退、转弯、上升、下潜运动功能;静水运动速度£2节,速度且连续可调,能平稳地停留在水中任意深度位置。
机器人本体配置有两套检测用摄像机,分别位于正前方及后方;其中前方摄像机为18倍变倍摄像机,带一维俯仰转台,转动范围±60°;后视摄像机为一广角摄像机,其视场角不小于35°。为克服水下照明不足,并配有四套亮度可调照明系统。
两路摄像系统的图像直接显示到控制箱显示屏上。
对显示的图像具有实时存储、抓图、回放等功能。
可实时显示机器人本体所处位置水深、温度等信息。
显示与操作控制箱具有外接锂电池电源输入口、220V交流电电源输入口以及USB口。
机械手的抓取能力:不小于1kg。可根据实际工作需要更换手指类型。
主体外型尺寸长×宽×高: 410×262×230,重量11kg。
4、设备配置:
机器人主体 1台
便携式显示与操作控制箱 1台
零浮力电缆及手动卷线滚 1套
主体及配件运输箱 1个
5、部分水下实验图片
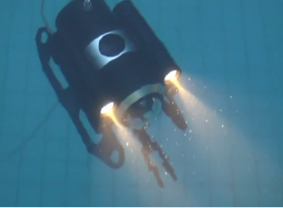

图1 机器人照明灯开启外观图 图2 水下抓取异物操作
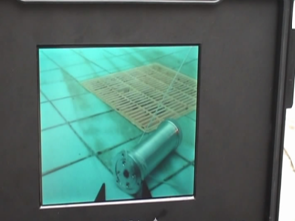
图3 水下抓取规则型异物
——某内陆湖探测系列图片

——某设备船体检测系列图片
——某水下设备检测系列图片


联系人:冯主任
电话:028-85100572∕13618081259