


(目前,该设备应用于大亚湾核电站)
异物打捞机器人的主要工作是在核电站大修期间,对堆芯上下部堆内构件吊出和回装堆芯时进行水下监视观察及对落入水池底部异物进行打捞。
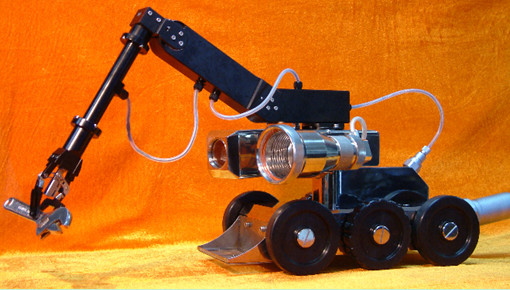
该设备由水下爬行机、二维云台、电视摄像系统、图像压缩存储系统、机械手、清扫机、水下吸泵和操控器所组成。机械手主要拾取落入水池中的螺丝刀、扳手等相对较大的异物;清扫机主要扫取螺钉、螺母及垫片等相对小体积的异物;而水下吸泵用来吸取类似玻璃、油漆碎片等粉渣类异物。打捞异物重量1Kg以内。机械手、清扫机、水下吸泵可根据异物类型方便更换。机器人可以在水深22m,呈弱酸性,γ辐射剂量率小于103rad/h的环境中工作,可前、后、左、右运动。
该机器人与国外同类产品相比具有以下特点:体积小,运动灵活;爬坡能力为30°,行驶速度0-9m/min连续可调;六轮驱动,运载能力强;针对异物种类机械手可轻松拆换,其中夹取型机械手有四个自由度,清扫型机械手、水下吸泵有两个自由度,打捞范围可以覆盖水池底部任意位置;运动小车自带异物筐,可方便装取、卸载打捞异物。
联系人:冯主任
电话:028-85100572∕13618081259
更多>同类资讯



(c)2005-2025 科技网 www.te-ch.tech 珠海神州网络有限公司版权所有 All Rights Reserved
